假肢機(jī)械手蘊(yùn)含的力學(xué)原理:從機(jī)械傳動(dòng)到精準(zhǔn)適配
假肢機(jī)械手的核心效能源于力學(xué)原理與工程技術(shù)的深度融合���,其發(fā)展圍繞“運(yùn)動(dòng)傳遞、力平衡控制����、動(dòng)態(tài)適配”三大核心力學(xué)邏輯演進(jìn)��,實(shí)現(xiàn)從簡(jiǎn)單抓取到類人操作的突破�����。
一、基礎(chǔ)傳動(dòng)力學(xué):運(yùn)動(dòng)的精準(zhǔn)傳遞
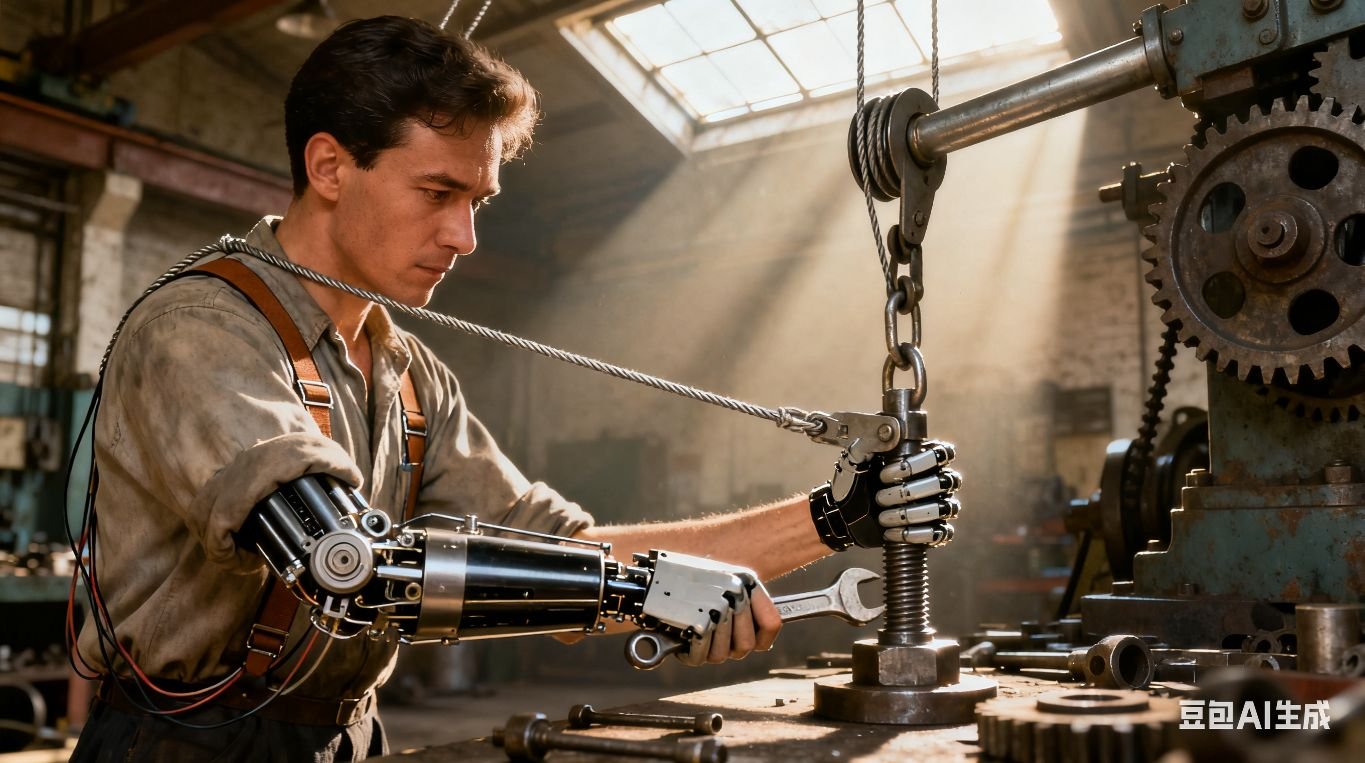
杠桿與齒輪傳動(dòng)是機(jī)械假肢的“運(yùn)動(dòng)骨架”�。文藝復(fù)興時(shí)期的機(jī)械假肢已采用杠桿原理,通過(guò)金屬軸聯(lián)動(dòng)指節(jié)板��,將肩部動(dòng)力轉(zhuǎn)化為手指開合動(dòng)作?���,F(xiàn)代索控式假肢延續(xù)此邏輯,以肩背帶牽引索為“力傳導(dǎo)媒介”��,配合齒輪組放大驅(qū)動(dòng)力��,使使用者通過(guò)肩部運(yùn)動(dòng)控制手指抓握�����,如隨意張開式假肢借助彈簧復(fù)位實(shí)現(xiàn)持物省力 �����。純機(jī)械仿生手更通過(guò)精密連桿系統(tǒng),將單一動(dòng)力源分配至多根手指��,完成撿豆子等精細(xì)動(dòng)作�。
二、驅(qū)動(dòng)與平衡力學(xué):力的可控輸出
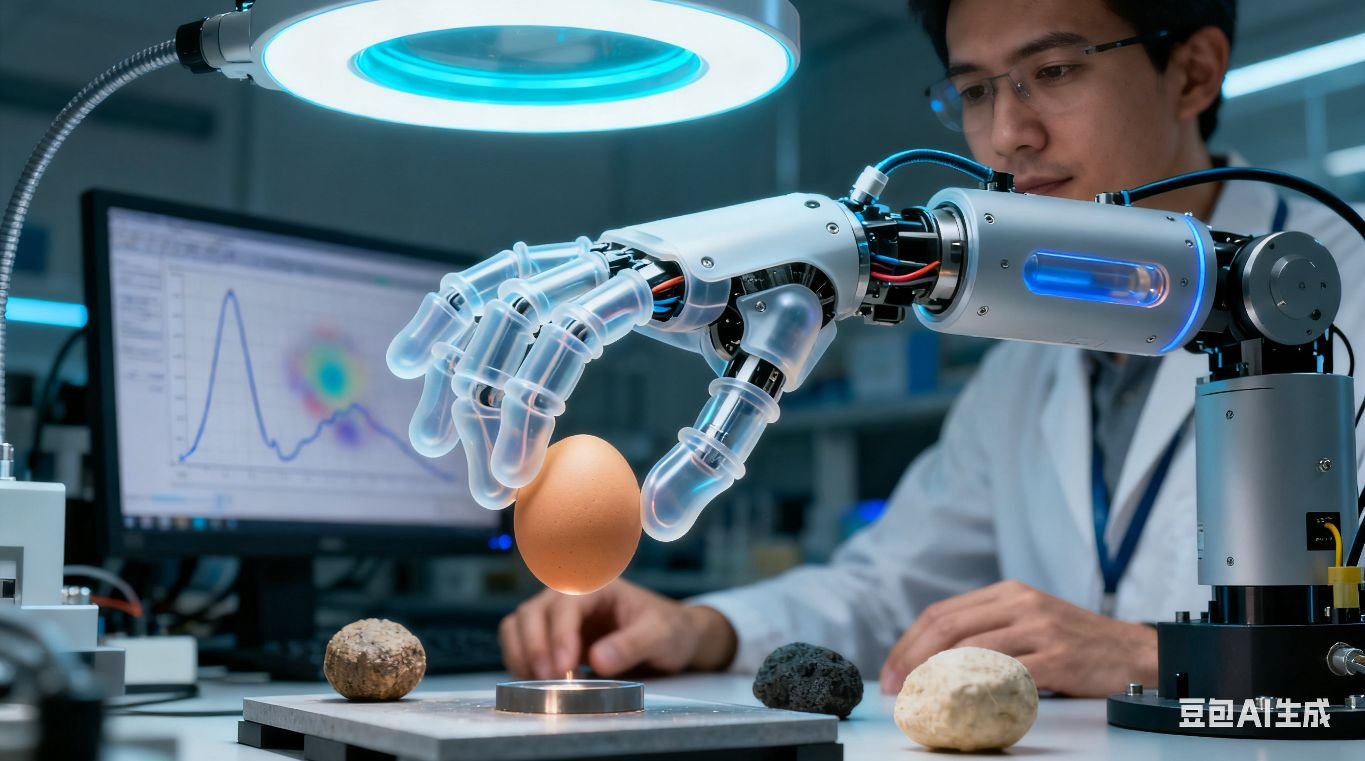
驅(qū)動(dòng)系統(tǒng)的力學(xué)優(yōu)化決定操作精度��。傳統(tǒng)假肢采用“彈簧-鎖扣”力平衡設(shè)計(jì)�����,如帶自鎖裝置的機(jī)械手通過(guò)彈簧提供閉合力�����,鎖扣固定抓握姿態(tài)���,解決持續(xù)施力難題?���,F(xiàn)代柔性機(jī)械手基于等壓腔原理�����,氣壓驅(qū)動(dòng)下剛性指節(jié)與柔性硅膠套協(xié)同變形,通過(guò)腔內(nèi)壓力均衡實(shí)現(xiàn)對(duì)不規(guī)則物體的自適應(yīng)抓取�����。形狀記憶合金(SMA)驅(qū)動(dòng)的仿生靈巧手�,則利用材料形變力放大效應(yīng),在0.37千克的重量下實(shí)現(xiàn)19個(gè)主動(dòng)自由度����,兼顧輕量化與驅(qū)動(dòng)力 �����。
三���、感知與反饋力學(xué):動(dòng)態(tài)適配環(huán)境
力反饋與觸覺感知構(gòu)建“閉環(huán)力學(xué)控制”�����。F-TAC Hand仿生手通過(guò)17個(gè)高分辨率觸覺傳感器�,實(shí)時(shí)捕捉0.1毫米級(jí)接觸變化��,結(jié)合算法調(diào)整抓握力��,使復(fù)雜環(huán)境下的抓取成功率從53.5%提升至100% 。肌電假肢則通過(guò)力-位混合控制�����,將肌肉電信號(hào)轉(zhuǎn)化為力矩參數(shù)�����,動(dòng)態(tài)調(diào)節(jié)手指關(guān)節(jié)受力�����,如HeroArm假肢借助微型馬達(dá)按比例輸出動(dòng)力����,實(shí)現(xiàn)手腕翻轉(zhuǎn)等精準(zhǔn)動(dòng)作。

本文整合自
1. 抖音百科《索控式上肢假肢》(2025)
2. 豆丁網(wǎng)《閉式關(guān)節(jié)柔性自適應(yīng)仿人義肢機(jī)械手的研究》(2024)
3. 中國(guó)科學(xué)技術(shù)大學(xué)新聞網(wǎng)《中國(guó)科大成功研發(fā)19自由度仿生靈巧手》(2025)
4. 光明網(wǎng)《我科學(xué)家打造會(huì)“感知”的機(jī)器手》(2025)
5. 抖音視頻《純機(jī)械打造的機(jī)械義肢���,原理是怎樣的����?》(2025)
6. 抖音視頻《老外這手臂義肢���,使用肌電信號(hào)控制》(2021)
本文科普內(nèi)容與圖片均由豆包AI(2025年11月2日生成)提供支持
